Orrery - Servo Testing
Many many moons ago, I read something about the DeMoor Orrery in Issue 114 of the MagPi (Raspberry Pi Official Magazine these days). An orrery, for all the other uneducated people like me, is something I would call a “planetary clock”, that shows the positions of the planets in our solar system, typically with the sun as center point.
And this particular article somehow burned itself into my brain. While having no greater use at all, it would still be so cool to see at all times when which planet is currently. And after coming back to this thought time and time again, the urge to build it myself finally became strong enough for me to do something about it.
Hardware
“Now Kevin”, I thought, “if you want to move stuff, you’ll need motors. Probably servo motors in case you want to move the planets to specific positions”. And fortunately I ordered so far unused servo motors from the robot shop like 2 to 3 years ago.
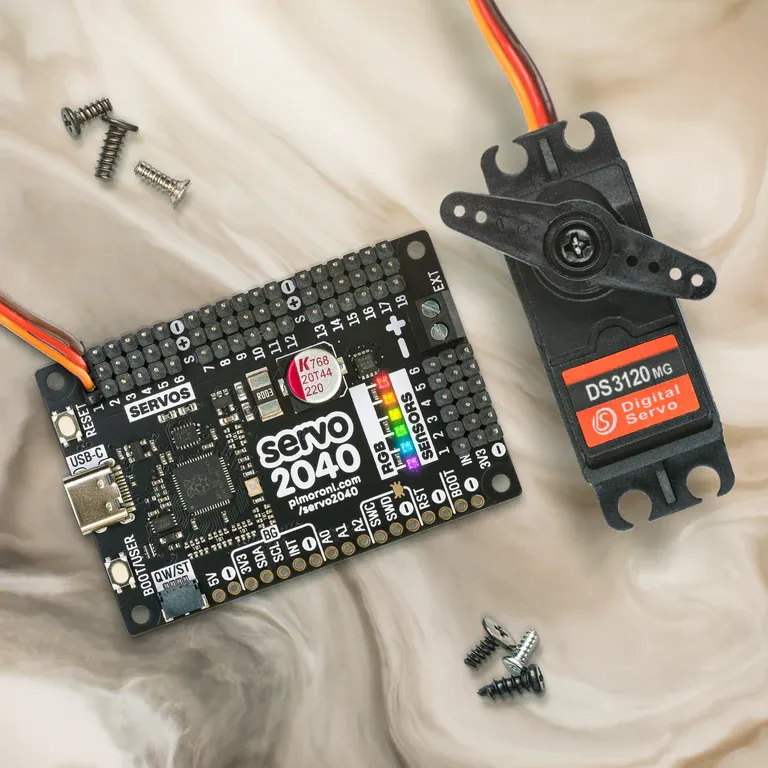
Namely, continuous rotation micro servos and metal gear micro servos


Now while thinking about what hardware to use in order to power these, I realized that I had another piece of hardware that I also ordered ages ago and never used. A servo 2040 from Pimoroni
Software
So having all these components I followed pimoronis documentation on the servo 2040 in order to see how the servos behave and how I could use them.
I thought of iterating from the max to the min value for both servos in order to see what they would do. The LEDs on the board indicate where on our way from min to max we are.
Here is the code I used for testing the servos
from plasma import WS2812
from servo import Servo, servo2040
import time
led_bar = WS2812(servo2040.NUM_LEDS, 1, 0, servo2040.LED_DATA)
led_bar.start()
led_brightness = 130
number_of_leds = 6
def lights_out():
led_bar.set_rgb(0, 0, 0, 0)
led_bar.set_rgb(1, 0, 0, 0)
led_bar.set_rgb(2, 0, 0, 0)
led_bar.set_rgb(3, 0, 0, 0)
led_bar.set_rgb(4, 0, 0, 0)
led_bar.set_rgb(5, 0, 0, 0)
servo = Servo(servo2040.SERVO_1) # calibration=0 => ANGULAR (default) | calibration=2 => CONTINUOS
min_value = servo.min_value()
max_value = servo.max_value()
# we want to let the strip of leds indicate where we are between min & max, so we need a delta value that helps us with that
led_delta = (abs(min_value) + abs(max_value)) / number_of_leds
current_value = min_value
step = (abs(min_value) + abs(max_value)) / 100
# we will reverse the step when we reach a limit, so we need a current_step to keep track of that
current_step = step
print("---- Initiating test sequence...")
print(f"min value: {min_value}")
print(f"max value: {max_value}")
print(f"led_delta: {led_delta}")
print(f"step: {step}\n")
print("---- Let's gooooooooooo....")
while True:
normalized_current_value = (current_value + abs(min_value))
how_often_does_led_delta_fit = int(normalized_current_value / led_delta)
# delta can fit number_of_leds times when it reaches max_value, thefore upper boundary
led_to_light = min(how_often_does_led_delta_fit, number_of_leds - 1)
lights_out()
led_bar.set_rgb(led_to_light, 0, led_brightness, led_brightness)
servo.value(current_value)
current_value += current_step
if current_value >= max_value:
current_step = -1 * step
current_value = max_value
print("REACHED MAX -> back to min")
led_bar.set_rgb(led_to_light, led_brightness, 0, led_brightness)
if current_value <= min_value:
current_step = step
current_value = min_value
print("REACHED MIN -> back to max")
led_bar.set_rgb(led_to_light, led_brightness, 0, led_brightness)
time.sleep_ms(100)
Conclusion
Now after testing the servos and thinking about what I want to do with them, it seems obvious that I will need more of the continuos rotation servos, as I plan to make little balls rotate continuously.
I am still unsure how to best translate the rotation of the planets around the sun to the little servos, but that’s a problem for future Kevin.
See ya in the next one,
Kevin
sources: